

How does a quadruped robot walk ?
- mkxprojet
- 13 nov. 2019
- 1 min de lecture
There are two different types of walks : the quasi-static walk and the dynamic walk. To draw a distinction between those two, we observe if the orthogonal projection of the gravity center stays or not inside the zone called “Sustentation Polygon”, which corresponds to the surface outlined by the set of contact points between the robot and the ground. If this gravity center projection is located inside the sustentation polygon, the robot is stable, else it is not.
Quasi-static Walk
While walking in a quasi-static mode, the robot’s gravity center never leaves the sustentation polygon. In that way, the robot stays stable all along its walk.
This type of walking is one of the safest way of walking since it allows to stop the robot at any given time without altering its stability.

Figure 1 – Quasi-static Walk
As shown above, the robot lifts one leg after another while making sure that its gravity center doesn’t go out of the sustentation polygon.
Dynamic Walk
While walking in a dynamic mode, the projection of the robot’s gravity center goes out of the sustentation polygon. Therefore, we use the robot’s inertia to make it walk.
In that case, we cannot stop its movements without fearing its fall
The dynamic walk allows to move faster, but it requires to have powering up and stability return sequences to start and stop a movement.
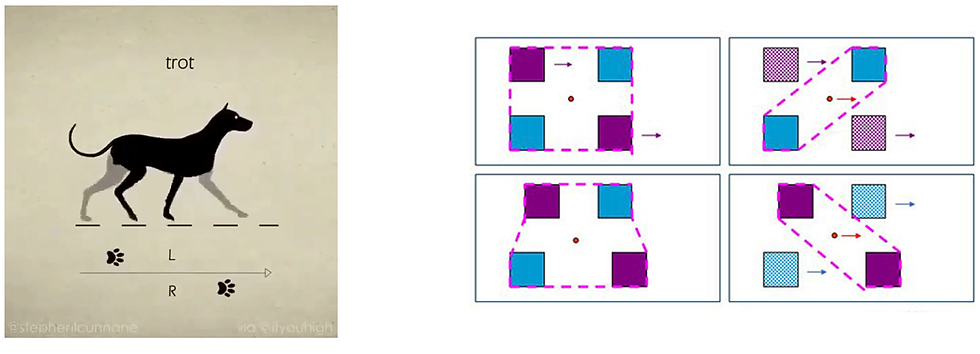
Figure 2 – Dynamic walk
As shown above, the robot lifts its two opposite legs simultaneously. This type of walking is one of the most used for quadrupeds robots.
Crossing Principle
Step crossing

Figure 3 – Step crossing
Pit crossing
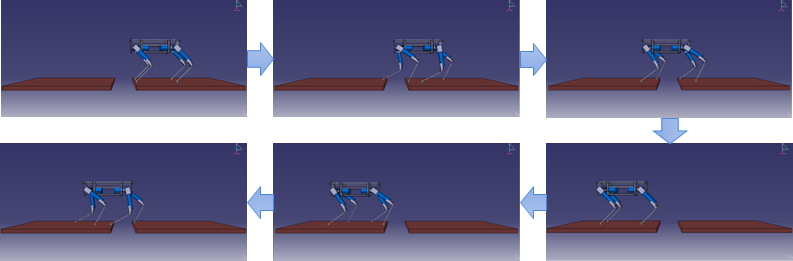
Figure 4 -Pit crossing

Commentaires